研究了全球 23 家企業(yè)的腔鏡手術(shù)機器人,我們總結(jié)出這 6 大產(chǎn)品迭代趨勢
作為外科醫(yī)療器械領(lǐng)域的技術(shù)頂峰,腔鏡手術(shù)機器人占據(jù)了手術(shù)機器人的最大細分市場,一直備受矚目。
在達芬奇進入中國近二十年的歷程中,腔鏡手術(shù)機器人的臨床應用價值和市場潛力已得到充分驗證,激勵了國內(nèi)企業(yè)加速入局。2021 年,中國腔鏡手術(shù)機器人迎來獲批元年,威高妙 手機 器人率先拿證,隨后,微創(chuàng)醫(yī)療機器人、思哲睿、精鋒、術(shù)銳 機器人等一眾企業(yè)的產(chǎn)品也相繼獲批。
2023 年,中國腔鏡手術(shù)機器人迎來 商業(yè) 化元年,國內(nèi)企業(yè)加快商業(yè)化步伐,并將商業(yè)版圖拓展至海外。在近兩個月,瑞龍外科、敏捷醫(yī)療、唯精醫(yī)療的腔鏡手術(shù)機器人相繼獲批 NMPA,國產(chǎn)陣營再添三員生力軍。
在此,動脈網(wǎng)研究了全球 23 家企業(yè)的 30 款產(chǎn)品,并訪談了博恩思、術(shù)銳 機器人、精鋒醫(yī)療、佗道醫(yī)療等行業(yè)領(lǐng)先企業(yè),以洞悉腔鏡手術(shù)機器人的創(chuàng)新特征、迭代趨勢及國產(chǎn)設備的發(fā)展?jié)摿Α?/p>


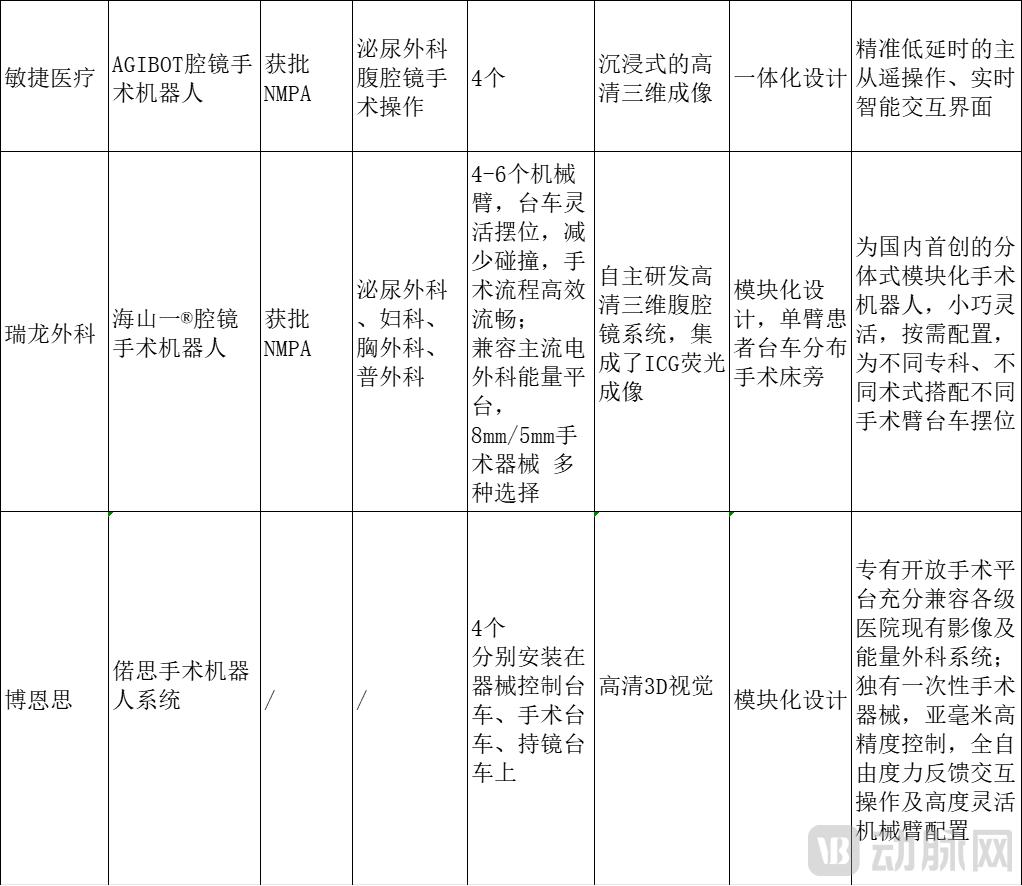
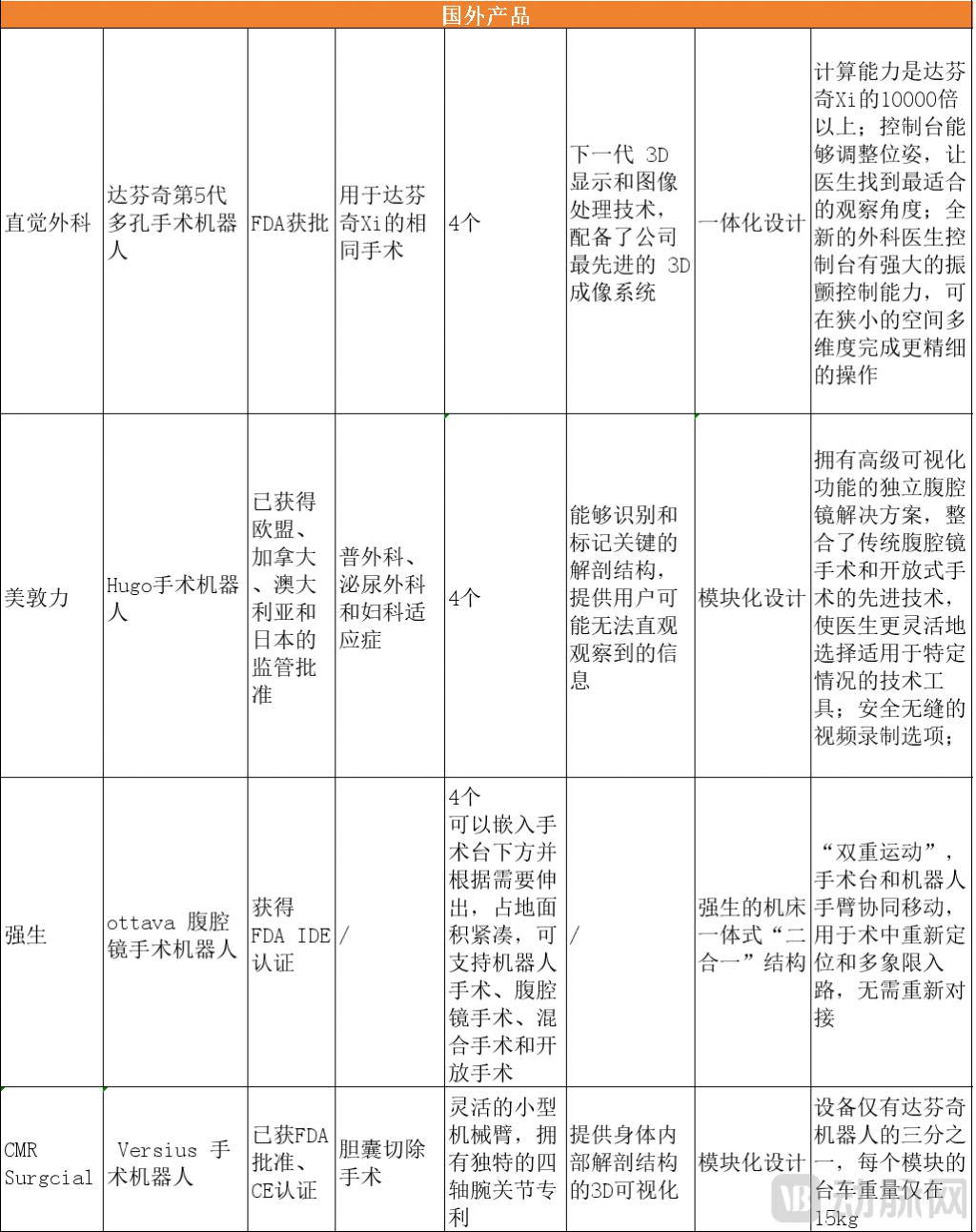
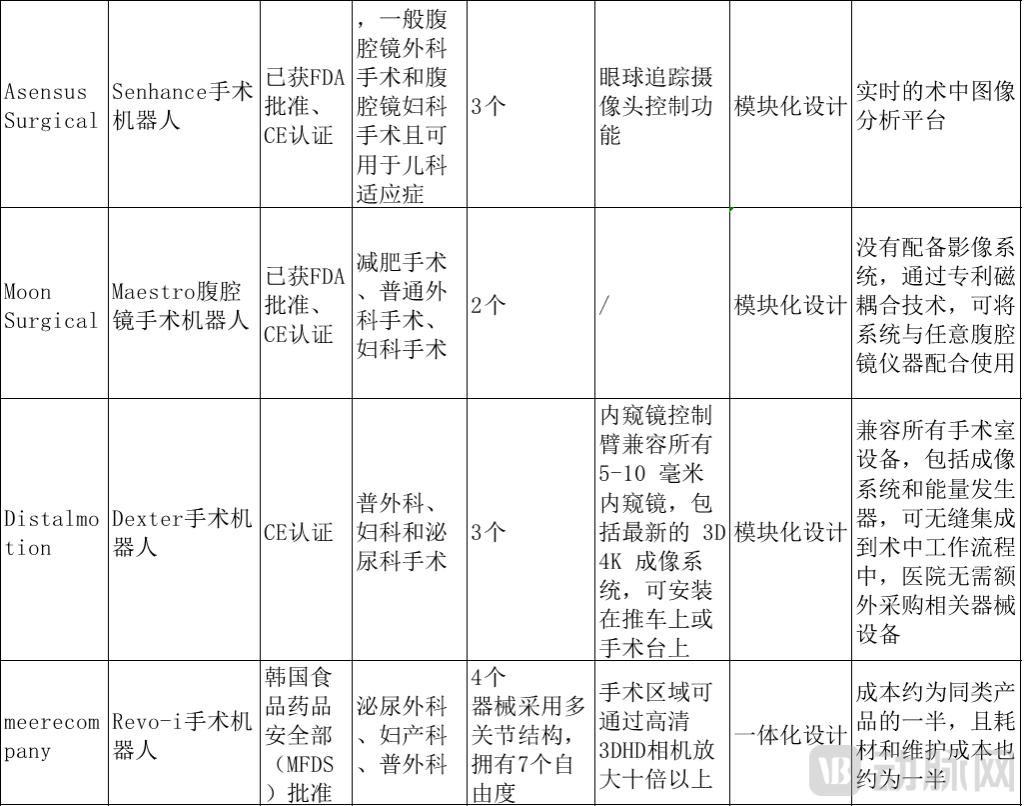 多孔腔鏡手術(shù)機器人產(chǎn)品盤點 動脈網(wǎng)制圖
多孔腔鏡手術(shù)機器人產(chǎn)品盤點 動脈網(wǎng)制圖

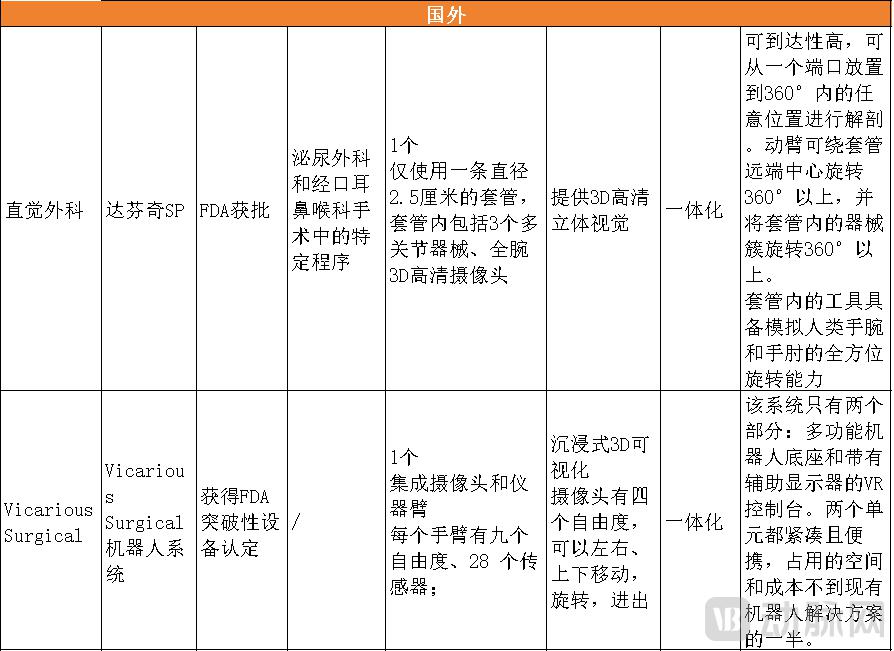 單孔腔鏡手術(shù)機器人產(chǎn)品盤點 動脈網(wǎng)制圖 注:"/" 代表根據(jù)公開資料未查詢到相關(guān)信息
單孔腔鏡手術(shù)機器人產(chǎn)品盤點 動脈網(wǎng)制圖 注:"/" 代表根據(jù)公開資料未查詢到相關(guān)信息
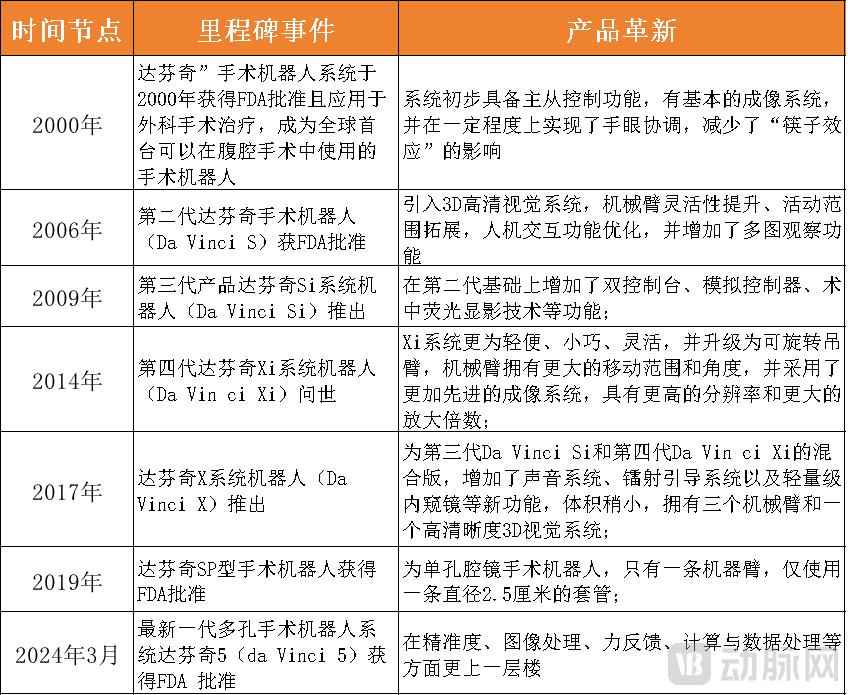 達芬奇機器人產(chǎn)品迭代的重要里程碑
達芬奇機器人產(chǎn)品迭代的重要里程碑
據(jù)《全球腔鏡手術(shù)機器人市場歷史規(guī)模及預測》,全球腔鏡手術(shù)機器人市場規(guī)模將不斷增長,預計 2025 年將達到 144 億美元,2021 年至 2025 年的復合年增長率為 21.7%,2030 年將達到 286 億美元,2025 年至 2030 年的復合年增長率為 14.6%。
六大產(chǎn)品迭代趨勢, 解碼國產(chǎn)腔鏡手術(shù)機器人核心競爭力
近年來,國產(chǎn)腔鏡手術(shù)機器人正在從追趕者逐步轉(zhuǎn)變?yōu)橛辛Ω偁幷摺⒕植恳I(lǐng)者,經(jīng)歷從跟隨模仿到引領(lǐng)創(chuàng)新的歷史性跨越。從產(chǎn)品技術(shù)維度來看,機械臂構(gòu)型優(yōu)化、專科器械創(chuàng)新、力反饋技術(shù)突破、影像導航升級、模塊化與一體化并行、單孔技術(shù)拓展成為產(chǎn)品迭代的重點趨勢。預示著,這場由國產(chǎn)力量主導的技術(shù)變革,正加速推動中國智能微創(chuàng)外科進入新紀元。
■ " 四臂 " 仍是最優(yōu)解,機械臂數(shù)量應以臨床本質(zhì)需求為核心
目前, 全球市場上的腔鏡手術(shù)機器人以四臂系統(tǒng)為主,其組合一般為 3 個操作臂和 1 個持鏡臂。 而之所以能成為主流,是因為四臂完美復現(xiàn)了 " 主刀醫(yī)生雙手 + 助手 " 的黃金三角配合模式,堪稱平衡術(shù)者操作靈活性、穩(wěn)定性和空間適應性的最優(yōu)解。
腔鏡手術(shù)中,保持目標組織區(qū)域的視野暴露非常重要,因此通常需要一個機械臂進行組織牽拉,另外兩個機械臂模擬主刀醫(yī)生的左右手,在暴露的區(qū)域內(nèi)完成手術(shù)操作。直覺外科曾推出三臂機器人,缺少進行組織牽拉的機械臂,由人工完成。由于歐美醫(yī)療人力資源成本高昂,其造成的資源浪費十分嚴重。因此,最新一代達芬奇 5 延續(xù)了四臂的構(gòu)型。
除此之外,市面上也出現(xiàn)了二臂、三臂以及五臂設計。在特定術(shù)式或科室應用中,二臂、三臂的緊湊型設計或?qū)⒊蔀楦叱杀拘б娴姆桨福欢灞鄯桨父嗫剂康目赡苁鞘中g(shù)協(xié)作的場景,為未來多學科聯(lián)合手術(shù)提供更多想象空間。
關(guān)于腔鏡手術(shù)機器人機械臂的數(shù)量,業(yè)內(nèi)的普遍共識為,其數(shù)量設計,最終需要回歸臨床的本質(zhì)需求。
腔鏡手術(shù)機器人機械臂的數(shù)量與手術(shù)類型息息相關(guān)。將機器人與醫(yī)生進行類比,一場手術(shù)至少需要一個主刀醫(yī)生及其雙手,因此,至少需要 2 個機械臂,才能滿足手術(shù)最基本的操作需求。隨著手術(shù)復雜程度增加,參與的醫(yī)生往往增多,對應所需的機械臂數(shù)量也更多。
器械臂數(shù)量需適應手術(shù)操作需求,博恩思表示,應同時針對孔位布局進行科學合理地配置與協(xié)同,以達成最佳的手術(shù)效果;
" 由于手術(shù)的操作空間和視野是有限的,過多的機械臂并不一定帶來臨床效益的提升,我們相信,未來,四臂機器人仍然是適應性最廣的主流選擇,我們更關(guān)注如何通過智能化算法優(yōu)化機械臂的協(xié)同效率,更貼合醫(yī)生的操作習慣。" 精鋒醫(yī)療表示。
" 未來,腔鏡手術(shù)機器人在機械臂數(shù)量方面的發(fā)展方向?qū)摹當?shù)量競爭’轉(zhuǎn)向‘功能性能優(yōu)化’。 " 佗道醫(yī)療指出,其核心在于通過技術(shù)創(chuàng)新提升單臂或多臂的功能性。例如,通過增強機械臂的靈活性、精準度和多功能性,減少對多臂的依賴,從而降低手術(shù)復雜性和成本。在功能性優(yōu)化方面,佗道醫(yī)療的佗靈 腔鏡手術(shù)機器人擁有 13 自由度控制臂,能為術(shù)者帶來高靈活性的操作體驗。此外,其獨創(chuàng)的主手二段力捏合技術(shù)可有效確保夾持力 " 恰到好處 ",降低軟組織副損傷。
■ 用特色專科器械打造差異化,高級微創(chuàng)外科器械耗材的使用能力成為一大競爭力
目前,擁有完善的器械配套耗材解決方案對于提升手術(shù)安全性與效率、適應不同手術(shù)需求具有重要意義。
那么, 什么樣的配套耗材才算得上 " 完善 "?衡量標準應該至少包括兩方面,一是包含了各類手術(shù)都需要使用的共性器械,二是包含了特色的專科化器械與高級器械。
首先,不同科室和術(shù)式對手術(shù)器械有不同需求,但有些器械為普外科、婦科、泌尿、胸外等科室手術(shù)中都會使用的器械,如單極電凝器、雙極電凝器、持針器、抓鉗等。這些器械組成的最小集合應當是所有腔鏡手術(shù)機器人產(chǎn)品都要具備的。針對此類產(chǎn)品,應當優(yōu)化工藝、降低成本,盡可能提升醫(yī)生操作體驗。
針對特殊操作需求的特色專科器械則是各個入局者的特色,一般針對較為復雜、高難度的術(shù)式,是企業(yè)差異化競爭優(yōu)勢的體現(xiàn)。例如,博恩思針對頭頸外科開發(fā)專科柔性器械,創(chuàng)造了全新無創(chuàng)治療方式,最大程度地發(fā)揮機器人的優(yōu)勢;精鋒醫(yī)療的單孔機器人搭載了新一代的 SuperArm 系列器械,逾 10 種 NMPA 批準的專用手術(shù)器械,專為狹窄空間內(nèi)工作設計,在常規(guī)入路及自然腔道入路手術(shù)中表現(xiàn)出色;佗道醫(yī)療的佗靈 腔鏡手術(shù)機器人提供滿足各科室臨床需求的手術(shù)器械,可滿足不同術(shù)式的定制化需求。
除此之外,是否具備使用高級微創(chuàng)外科器械耗材的能力是衡量腔鏡手術(shù)機器人性能的另一重要標準。與刀、剪、鉗、鑷等簡單工具相比,操縱高級微創(chuàng)外科器械對于系統(tǒng)的機械臂自由度與靈活性、操作精度和穩(wěn)定性、高精度運動傳遞、感知與反饋技術(shù)、智能控制算法、系統(tǒng)集成等方面要求更高,技術(shù)壁壘也更高。但其所帶來的技術(shù)紅利也顯而易見,對于提升手術(shù)精準度與操作靈活性意義重大,能使得系統(tǒng)更好地支持復雜術(shù)式與擴大適應證。
在這一方向,國產(chǎn)腔鏡手術(shù)機器人不斷發(fā)力。
術(shù)銳 機器人正在聯(lián)合瑞金醫(yī)院研發(fā)可彎超聲刀,具有全球首創(chuàng)性質(zhì),目前已經(jīng)取得突破性進展;威森特手術(shù)機器人憑借高精度機械臂設計、先進驅(qū)動技術(shù)、多自由度控制、智能反饋系統(tǒng)等先進技術(shù),能進行吻合釘激發(fā)、刀片推出等復雜動作,實現(xiàn)了高級微創(chuàng)外科器械耗材在機器人系統(tǒng)中的主手操作使用;精鋒多孔機器人提供了 30 多種適配手術(shù)器械,包括超聲刀、雙極大力抓鉗等高級器械,覆蓋了全科室的臨床應用場景;佗道醫(yī)療的 54cm 長超聲刀突破能量衰減技術(shù)壁壘,實現(xiàn)與器械等長,避免 " 長短手 ",更有助于深在手術(shù)可達性。
■ 警惕力反饋引入導致的性價比失衡,盡量保留醫(yī)生的 " 操作直覺 "
近年來,力反饋技術(shù)成為手術(shù)機器人賽道的一大關(guān)注重點,因能使醫(yī)生感知器械與組織間的接觸力,在精細操作中精準控制施力強度,成為入局玩家角逐的領(lǐng)域之一。
目前,直覺外科最新一代機器人達芬奇 5 已經(jīng)引入了力反饋技術(shù),部分可選器械能讓系統(tǒng)測量手術(shù)過程中施加在人體組織上的微小力,并讓外科醫(yī)生感受到力度。在臨床前研究中,不同程度經(jīng)驗的外科醫(yī)生使用了力反饋技術(shù),結(jié)果表明施加在組織上的力減少了高達 43%,這可能意味著對組織造成的創(chuàng)傷更小。
而國產(chǎn)腔鏡手術(shù)機器人也加速創(chuàng)新布局:微創(chuàng) 機器人旗下的圖邁 四臂腔鏡手術(shù)機器人首創(chuàng)了腔鏡手術(shù)機器人力覺感知呈現(xiàn)組件—— " 力呈現(xiàn) ",雖然歐美機器人已有類似功能,但成本遠高于圖邁 四臂腔鏡手術(shù)機器人;威森特手術(shù)機器人引入觸覺反饋技術(shù),對高風險術(shù)式和動作進行了力量識別和預警反饋,使醫(yī)生能夠了解力對病灶組織的影響程度;
" 傳統(tǒng)腔鏡手術(shù)機器人系統(tǒng)因缺乏直觀的力反饋機制,主刀醫(yī)生在手術(shù)過程中難以憑借敏銳的觸感實施精細的手術(shù)操作。這限制了傳統(tǒng)腔鏡手術(shù)機器人在臨床體驗與安全性方面的進一步提升,而力反饋技術(shù)正是解決這一痛點的關(guān)鍵。" 佗道醫(yī)療表示,公司目前已在力反饋方面取得突破進展。
2025 年 2 月 28 日,佗道醫(yī)療承擔的 " 手術(shù)機器人力感知與力反饋技術(shù) " 國家重點研發(fā)計劃項目正式啟動。該技術(shù)具備實時觸覺反饋功能,醫(yī)生可通過力反饋系統(tǒng)實時感知手術(shù)器械與組織間的接觸力,精準控制操作力度、避免組織損傷。同時,該技術(shù)可以高度還原真實手術(shù)觸覺反饋,幫助縮短學習曲線,對于拓展手術(shù)邊界、助力手術(shù)自動化也有重大意義。
從整體來看,目前,具有力反饋功能的腔鏡手術(shù)機器人產(chǎn)品仍在少數(shù),一大原因便在于引入力反饋功能后,器械成本可能會上升。以達芬奇 5 為例,其通過視覺反饋,將組織受力的大小以低、中、高三檔呈現(xiàn)在顯示屏上。技術(shù)本身涉及的硬編碼芯片壁壘并非難以企及,但會導致成本提升。術(shù)銳 機器人創(chuàng)始人徐凱教授指出, 如何避免有限的功能提升與顯著的成本增長之間的性價比失衡,進而避免對產(chǎn)品的市場接受度造成影響,是一個重要命題。 目前,術(shù)銳 機器人正在開發(fā) " 本體傳感 " 創(chuàng)新技術(shù),創(chuàng)新力感知算法,不需要增加額外硬件便可實現(xiàn)力反饋功能。
此外, 力反饋的實現(xiàn)形式豐富多樣,重力補償、碰撞檢測、組織特性模擬等都屬于力反饋的范疇。不同經(jīng)驗、不同科室的醫(yī)生偏好不同,如何實現(xiàn)力反饋臨床價值的最大化尤為重要。 這要求腔鏡手術(shù)機器人突破對于 " 觸覺還原 " 的單一追求,建立起符合醫(yī)生 " 外科直覺 " 的交互范式。
在臨床實踐中,許多一線醫(yī)生并不苛求手術(shù)機器人對于組織軟硬度的 " 一比一復刻 ",而是想要保留傳統(tǒng)腔鏡手術(shù)中器械扭轉(zhuǎn)阻尼、抓持力反饋等基礎力學特征。這能極大降低學習曲線,幫助醫(yī)生快速適應腔鏡手術(shù)機器人操作場景。
參考 汽車 轉(zhuǎn)向助力的演變,通過優(yōu)化阻尼與控制邊界實現(xiàn)司機對路感的自然遷移,遵循上述原則,博恩思機器人通過力反饋技術(shù)保留傳統(tǒng)微創(chuàng)手術(shù)操作習慣,讓有經(jīng)驗的醫(yī)生可快速掌握機器人手術(shù)。
■ 發(fā)力術(shù)中熒光顯影與 AI 導航,多模態(tài)融合、智能化實時處理助力手術(shù)視野的清晰度、精準度提升
目前,3D 高清內(nèi)窺鏡系統(tǒng)已成為腔鏡手術(shù)機器人的標配,影像系統(tǒng)在分辨率提升、立體視覺重構(gòu)、低延遲傳輸方面的表現(xiàn)不斷優(yōu)化。如,康諾思騰的 Sentire 思騰腔鏡手術(shù)機器人獨創(chuàng) Cspeed Vision3D 影像系統(tǒng),借助雙通道光學系統(tǒng)呈現(xiàn)全方位、放大、立體、清晰的圖像;瑞龍外科的海山一 腔鏡手術(shù)機器人自主研發(fā)高清三維腹腔鏡系統(tǒng),集成了 ICG 熒光成像,系統(tǒng)與醫(yī)生控制臺深度整合,主刀醫(yī)生可一鍵實現(xiàn)拍照、錄像、畫中畫、180 ° 反轉(zhuǎn)等功能,功能更便捷,流程更高效;佗道醫(yī)療的腔鏡手術(shù)機器人 YC200 將推出 4K3D 熒光圖像,術(shù)者能更輕松地判斷臟器膜結(jié)構(gòu)、血管間的層次關(guān)系,更精確地識別微小的深度變化,進一步提升了手術(shù)視野的清晰度和精準度。
同時, 隨著熒光顯影和 AI 導航技術(shù)的發(fā)展,腔鏡手術(shù)機器人影像系統(tǒng)正經(jīng)歷從 " 高清記錄 " 向打造 " 影像引導的治療閉環(huán) " 的范式轉(zhuǎn)移。
在傳統(tǒng)腔鏡手術(shù)中,腫瘤切除過程中病變組織邊界的判斷高度依賴醫(yī)生個人經(jīng)驗,易出現(xiàn)過度切除健康組織的情況。而 ICG 熒光顯影和 NBI 窄帶成像等影像技術(shù)通過增強血管 / 組織對比度,可實現(xiàn)腫瘤邊界可視化,顯著提升切緣精準度。
同時, AI 算法的引入,可對熒光顯影的二維圖像進行三維重建,構(gòu)建腫瘤浸潤深度的空間拓撲結(jié)構(gòu),并生成三維切除路徑規(guī)劃方案,有效解決了傳統(tǒng)二維顯影難以指導深層組織精準切除的痛點。
先進的成像技術(shù)與 AI 相結(jié)合,實現(xiàn)病灶識別到手術(shù)切除的全流程智能化、自動化,將是未來手術(shù)機器人重要的發(fā)展方向。博恩思介紹,未來手術(shù)機器人甚至可能實現(xiàn)自動縫合。
精鋒醫(yī)療最新一代多孔機器人 MP2000 搭載了完全自主研發(fā)的熒光顯影成像系統(tǒng),有單熒光、融合熒光、梯度熒光三種熒光模式可自由選擇,為醫(yī)生提供了更清晰、精準的視覺導航和操作指引。" 影像系統(tǒng)未來發(fā)展的核心在于,實現(xiàn)從醫(yī)生的‘視覺輔助’工具到‘智能決策’中樞的價值突破。" 精鋒醫(yī)療表示,將進一步與 AI 影像增強算法相結(jié)合,提升術(shù)中導航能力。
可以預見,腔鏡機器人影像系統(tǒng)將朝著多模態(tài)融合、智能化實時處理、跨尺度成像方向迭代。
■ 一體化與模塊化并行發(fā)展,臨床場景適配決定技術(shù)選型
全球范圍內(nèi),從操作臂構(gòu)型的技術(shù)路線來看,腔鏡手術(shù)機器人可以分為 3 種:以直覺外科為代表的一體式結(jié)構(gòu)、以美敦力為代表的模塊化結(jié)構(gòu)及以強生為代表的機床一體化 " 二合一 " 結(jié)構(gòu)。目前,市場上的現(xiàn)有產(chǎn)品以前兩種技術(shù)路線為主,其中一體式結(jié)構(gòu)占據(jù)主流。
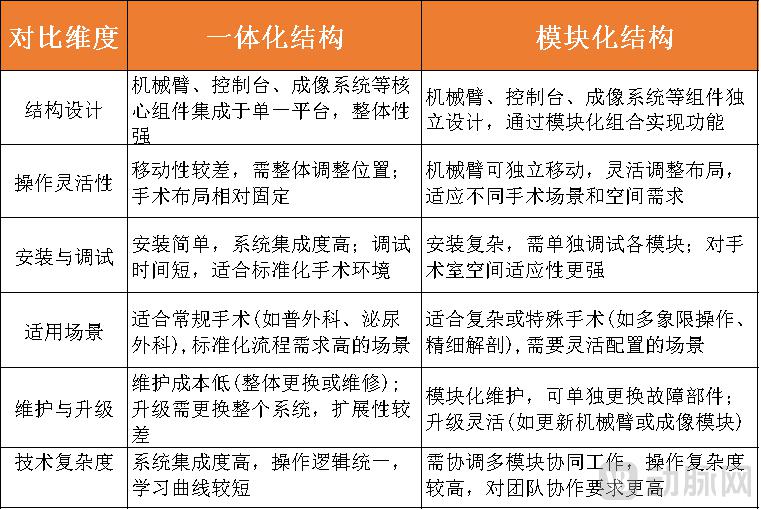 一體式、分體式腔鏡手術(shù)機器人對比 動脈網(wǎng)制圖
一體式、分體式腔鏡手術(shù)機器人對比 動脈網(wǎng)制圖
二者對比,分體式設計最顯著的優(yōu)勢在于,其模塊化臺車可根據(jù)術(shù)式靈活擺位,更好適配不同手術(shù)以及手術(shù)室環(huán)境;一體兩面地,其局限性在于,臺車排布和裝機效率相對較低,且由于各模塊需要協(xié)同工作,對兼容性和穩(wěn)定性要求高,調(diào)試和維護工作更為復雜;一體化設計系統(tǒng)集成度高,各部件協(xié)同工作更流暢,性能和穩(wěn)定性經(jīng)過充分驗證;局限性則在于功能和配置相對固定,難以根據(jù)手術(shù)不同需求和醫(yī)院條件靈活調(diào)整。
在中國腔鏡手術(shù)機器人市場上,一體化設計占據(jù)絕對主流,但國內(nèi)企業(yè)也在模塊化設計上取得突破。
2025 年 3 月,瑞龍外科擁有完全自主知識產(chǎn)權(quán)的海山一 腔鏡手術(shù)機器人正式獲得 NMPA 批準,實現(xiàn)了 " 分體式架構(gòu) + 全專科適配 " 雙重突破。作為國內(nèi)首個模塊化手術(shù)機器人,海山一 支持醫(yī)院按需靈活采購臺車及配件,輕量化機身適配老舊手術(shù)室且無需改造場地;同時,海山一 是首款上市即獲批普外科、泌尿外科、婦科、胸外科四大專科全適應證的國產(chǎn)機器人,且在低位直腸前切除術(shù)、肺葉切除術(shù)等復雜手術(shù)中提升了復雜術(shù)式覆蓋能力與臨床價值。
博恩思構(gòu)建新型人機協(xié)同范式與傳統(tǒng)腔鏡手術(shù)充分兼容,最大程度保留醫(yī)生原有的解剖學認知體系、操作習慣和數(shù)十年的手術(shù)經(jīng)驗,盡可能縮短學習曲線,而模塊化設計允許醫(yī)生從臨床功能到手術(shù)角色逐步實現(xiàn)人機協(xié)同,避免全面重構(gòu)手術(shù)思維。
總的來看,一體化設計和模塊化設計各有所長,拋開應用場景來定義孰優(yōu)孰劣意義不大。針對我國地區(qū)中心醫(yī)院醫(yī)生多具備基礎腔鏡經(jīng)驗但缺乏機器人專項培訓的現(xiàn)狀,模塊化設計或許為合適的選擇;而對于超大型手術(shù)、復雜高難度手術(shù)或者遠程手術(shù),一體式腔鏡手術(shù)機器人則成為最佳選擇,因其能夠有效降低對人力的需求,協(xié)同控制更加穩(wěn)定。 二者受眾市場與技術(shù)路線存在顯著差異,并非簡單的優(yōu)劣之分,而是要靠臨床場景和市場需求決定技術(shù)選型。
■ 單孔機器人適應證將持續(xù)拓展,經(jīng)自然腔道或?qū)⒊蔀橄乱槐c
目前, 業(yè)內(nèi)普遍認為,單孔腔鏡手術(shù)機器人是比多孔更先進的一代技術(shù), 但受限于技術(shù)難度、應用場景等因素,目前國內(nèi)入局研發(fā)單孔機器人的企業(yè)較少。
相比多孔機器人,單孔機器人的所有器械通過同一個通道進入體內(nèi),需要解決器械在有限空間內(nèi)的運動協(xié)調(diào)問題,避免器械相互干涉,同時保證足夠的靈活性,這對機械設計、控制算法的優(yōu)化提出了極高的要求。
為應對單孔手術(shù)中器械空間受限、視野受阻及器械沖突等技術(shù)挑戰(zhàn),術(shù)銳 機器人依托國際首創(chuàng)的蛇形臂技術(shù),率先推出國內(nèi)首款獲批的單孔手術(shù)機器人。其手術(shù)器械可實現(xiàn)全方位、大角度的靈活彎曲與精準操作,操作范圍更加廣泛,在手術(shù)靈活性、穩(wěn)定性和精準度方面展現(xiàn)出比肩國際品牌的卓越性能。
此外,精鋒醫(yī)療也成功攻克單孔機器人的多項技術(shù)難點,研發(fā)出國內(nèi)首款單臂單孔機器人,突破了九軸聯(lián)動肩肘腕多級導向傳動技術(shù),研制 " 肩 - 肘 - 腕 " 柔性關(guān)節(jié),通過器械驅(qū)動體單臂集成設計,實現(xiàn)四個器械同時在單孔內(nèi)操作,且操作靈活、相互協(xié)調(diào)。此外,精鋒醫(yī)療獨創(chuàng)的 " 肘關(guān)節(jié)藏袖 " 設計,實現(xiàn)了比國外產(chǎn)品更大的操作范圍。
同時,與多孔機器人相比,單孔機器人臨床適應證與應用場景相對有限,常作為多孔機器人術(shù)式覆蓋的補充。為了應對這一局限,術(shù)銳 機器人采用 " 面向連續(xù)體機構(gòu)的形變驅(qū)控技術(shù) ",以超彈性鎳鈦合金細桿取代傳統(tǒng)鋼絲繩,在手術(shù)臂內(nèi)部周向布置 20 余根細桿,連續(xù)貫穿并協(xié)同推拉運動,相較于傳統(tǒng)單鋼絲拉動,顯著提升了臂體的負載能力與柔韌性。憑借這一領(lǐng)先技術(shù),術(shù)銳 機器人開發(fā)出使用世界首創(chuàng)技術(shù)的術(shù)銳 蛇形臂單孔腔鏡手術(shù)機器人。國家藥監(jiān)局官方評價指出:" 該產(chǎn)品采用國際首創(chuàng)、擁有自主知識產(chǎn)權(quán)的創(chuàng)新技術(shù),具有運動范圍廣、負載能力強、可靠性高等技術(shù)優(yōu)勢,有效填補了國內(nèi)空白 "。
目前,術(shù)銳 單孔機器人已實現(xiàn)多科室臨床應用覆蓋,包括泌尿外科、婦科、普外科、胸外科及小兒外科,并正積極拓展頭頸外科及甲乳外科等新適應癥,已成功完成口咽腫瘤切除術(shù)、乳腺切除術(shù)及甲狀腺切除術(shù)的臨床應用。截止當前,術(shù)銳 機器人已在全球范圍內(nèi)開創(chuàng)了 40 余項國際首創(chuàng)術(shù)式,包括全球首例完全單孔機器人遠端胃癌根治術(shù)(畢 -I 式吻合)、全球首例完全單孔機器人進展期胃癌根治性全胃切除術(shù)、全球首例無氣腹 Vnotes 子宮切除術(shù)等。
此外, 與多孔機器人相比,單孔機器人在需兼顧創(chuàng)傷控制與操作精度的交叉領(lǐng)域優(yōu)勢明顯 。其中,婦科手術(shù)便是典型代表,常涉及盆腔深部操作且患者對微創(chuàng)美容需求顯著。單孔機器人可采取經(jīng)肚臍、經(jīng)陰道方式,將體表瘢痕發(fā)生率控制在理想范圍,甚至實現(xiàn)完全無創(chuàng)無疤痕。
經(jīng)自然腔道機器人呈現(xiàn)出顯著的臨床優(yōu)勢,博恩思經(jīng)口手術(shù)已經(jīng)可以完成聲帶腫瘤、會厭腫瘤、梨狀窩腫瘤切除,幾乎無出血現(xiàn)象,患者聲帶無損傷語言功能充分保護,博恩思表示,未來會開發(fā)更多的臨床適應癥。
未來,單孔機器人將圍繞靈活性、低創(chuàng)傷、廣應用場景持續(xù)迭代,在更廣泛的科室和手術(shù)類型中逐步突顯價值,尤其是在減少術(shù)后疤痕、縮短術(shù)后恢復時間等方面的臨床優(yōu)勢將進一步顯現(xiàn),與多孔機器人并行發(fā)展,形成互補。
立足本土市場打出差異化優(yōu)勢
目前,國產(chǎn)腔鏡手術(shù)機器人賽道不斷涌現(xiàn)創(chuàng)新突破,國內(nèi)入局者立足中國本土市場,正在打造更加適合中國實際國情的手術(shù)機器人解決方案。
從產(chǎn)品設計邏輯與市場需求的角度分析,與中國相比,歐美國家人力成本更加高昂,自動化手術(shù)設備的應用能夠有效降低醫(yī)療服務的邊際成本;其次,完善的醫(yī)保支付體系與商業(yè)保險制度使終端用戶對醫(yī)療設備的采購成本敏感度較低,這使得達芬奇手術(shù)機器人系統(tǒng)在歐美市場展現(xiàn)出顯著的適應性與生命力,70% 的設備銷量集中于歐美地區(qū)。
博恩思表示,中國醫(yī)療市場具有不同的特征:其一,中國臨床醫(yī)師手術(shù)技能高;其二,商業(yè)醫(yī)療保險尚未大范圍普及, 通過技術(shù)創(chuàng)新降低機器人入院成本及手術(shù)成本,從根本上緩解醫(yī)療資源分布不均的結(jié)構(gòu)性矛盾,實現(xiàn)醫(yī)療普惠是國內(nèi)廠商共同的使命。
目前,國產(chǎn)腔鏡手術(shù)機器人在價格上的優(yōu)勢逐漸顯現(xiàn)。隨著國產(chǎn)設備價格降低,預計將推動市場快速擴展,尤其是在中小醫(yī)院的滲透率提升。這將使得高端機器人手術(shù)設備的市場壁壘逐步被打破,為進一步普及奠定基礎。
在成本控制方面,精鋒醫(yī)療將多孔、單孔手術(shù)機器人及遠程手術(shù)系統(tǒng)整合為一體化平臺,在行業(yè)率先推出了 " 三合一 " 外科手術(shù)解決方案,一套控制系統(tǒng)能同時適配多孔與單孔機器人,意味著醫(yī)院購買精鋒多孔機器人后,可以輕松擴展至單孔,還能夠?qū)崿F(xiàn)本地手術(shù)和遠程手術(shù)的無縫切換,用更低的整體配置成本最大化滿足不同的臨床需求。
" 當然, 價格便宜并不是國產(chǎn)腔鏡機器人的唯一優(yōu)勢,如今,國產(chǎn)設備已經(jīng)能夠在性價比高的基礎上實現(xiàn)產(chǎn)品性能的超越。 " 術(shù)銳 機器人創(chuàng)始人徐凱教授介紹,以術(shù)銳 機器人為例,其價格預計僅為達芬奇 SP 的 2/3,并憑借在普外科、胸外科領(lǐng)域創(chuàng)造諸多世界首例的術(shù)式,有望在適應證覆蓋方面優(yōu)于達芬奇 SP。
同時, 遠程手術(shù)也是國產(chǎn)腔鏡手術(shù)機器人的一大亮點。
術(shù)銳機器人先后完成了準軍事化環(huán)境下的島礁遠程手術(shù)、全球首次中美跨洋超遠程動物實驗。尤為矚目的是,近期成功實施的全球首例中歐遠程單孔機器人胸外科人體手術(shù),是歐洲醫(yī)療團隊首次在核心手術(shù)場景中采用中國原創(chuàng)的手術(shù)機器人,標志著中國高端醫(yī)療資源向歐洲發(fā)達市場 " 反向下沉 " 的歷史性轉(zhuǎn)折。
威高集團的 " 妙手 " 機器人在山東威海、青島兩地順利實施全國首例 " 量子遠程手術(shù) ";精鋒醫(yī)療成功開展了全球首次跨洲際、雙向通訊距離超 20000 公里的超遠程機器人人體手術(shù),目前已開展了超過 200 例遠程手術(shù)探索;微創(chuàng)醫(yī)療的圖邁 機器人,在西藏拉薩成功實施全球首次機器人衛(wèi)星遠程手術(shù),標志著基于衛(wèi)星通信的遠程手術(shù)控制技術(shù)獲得里程碑式突破……
除此之外, 國產(chǎn)腔鏡手術(shù)機器人在力反饋功能探索、個性化耗材制造、供應鏈整合和本土化服務等方面具備獨特優(yōu)勢, 在國家政策對國產(chǎn)高端醫(yī)療設備的支持力度加大的背景下,有望以更加靈活的商業(yè)模式、更快的臨床需求響應速度、更聚焦中國高發(fā)病種的解決方案,快速推動國產(chǎn)品牌市場競爭力的提升。
在適應證方面,心外科、兒科的覆蓋成為達芬奇相比國產(chǎn)腔鏡手術(shù)機器人的重要優(yōu)勢,而目前,國內(nèi)企業(yè)也在加速追趕。據(jù)術(shù)銳 機器人創(chuàng)始人徐凱教授介紹,公司正在與多家醫(yī)院合作,并承擔了國家重點研發(fā)計劃專項以研發(fā)心臟單孔手術(shù)機器人。
博恩思表示,針對風險高、難度大的復雜術(shù)式,機器人手術(shù)產(chǎn)品還相對空白,從 0 到 1 的創(chuàng)新探索將對行業(yè)產(chǎn)生巨大推動,期待與行業(yè)生態(tài)伙伴形成合力,共同發(fā)現(xiàn)醫(yī)學機器人更多的可能。
來源: vb 動脈網(wǎng)